Produktbeschreibung

Allgemeines
Mariner 3S proliner™, proliner™ plus und proliner™ navi3 sind Roboter zur Reinigung von Schwimmbeckenböden. Die Geräte werden in befüllten Becken eingesetzt, das Wasser dient dabei der Kühlung des Antriebs und des Pumpenmotors.
Hersteller
Mariner 3S AG
Brunnmattstrasse 7
CH-5236 Remigen
www.mariner-3s.com
Eine Liste der Vertriebspartner finden Sie auf www.mariner-3s.com
Übersicht proliner und proliner plus
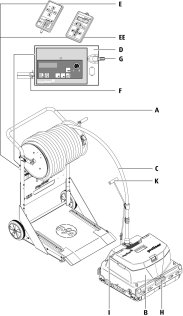
A Transportwagen
B Reinigungsroboter
C Schwimmkabel mit Halteseil
D Steuerungskasten und Bedienkonsole
E Fernbedienung proliner
EE Fernbedienung proliner plus
F Anschluss für Schwimmkabel
G Stromversorgungskabel
H Griffstelle I Griffstelle
K Aushebegriff
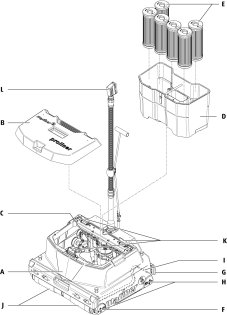
A Gehäuse
B Gehäusedeckel
C Steuerungsund Antriebseinheit
D Filterbox
E Filterpatronen
F Seitenführung
G Anschlaglineal
H Walzenachsen I Zahnriemen
J Walzen
K Verschlusskrallen
L Stecker
Übersicht proliner navi3
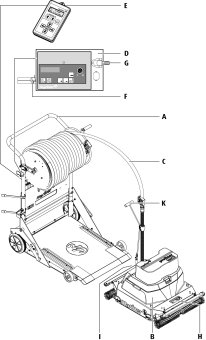
A Transportwagen
B Reinigungsroboter
C Schwimmkabel mit Halteseil
D Steuerungskasten und Bedienkonsole
E Fernbedienung
F Anschluss für Schwimmkabel
G Stromversorgungskabel
H Griffstelle I Griffstelle
K Aushebegriff
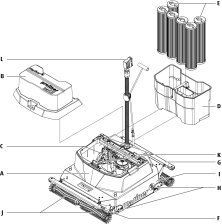
A Gehäuse
B Gehäusedeckel
C Steuerungsund Antriebseinheit
D Filterbox
E Filterpatronen
F Seitenführung
G Anschlaglineal
H Walzenachsen I Zahnriemen
J Bürsten
K Verschlusskrallen
L Stecker
Typenschild
Typenschild Roboter
Typenschild Transportwagen
Bedienelemente
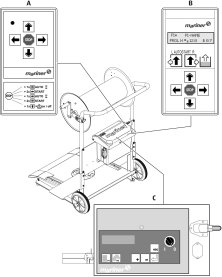
Die Bedienung erfolgt im Normalfall über die Fernbedienung mit LED (A) für den proliner oder über die Fernbedienung mit LCD (B) für proliner plus/proliner navi3. Mit ihr kann der Benutzer:
- den Reinigungsroboter manuell an Land und unter Wasser steuern
- gespeicherte, automatisch gesteuerte Reinigungsprogramme aufstarten
Die Bedienkonsole (C) wird für Änderungen der Grundund Programmeinstellungen verwendet. Fällt die Fernbedienung aus, so ist es möglich, den Reinigungsroboter auch mit der Bedienkonsole im Notbetrieb zu manövrieren.
Funktionen der Bedienkonsole:
- Ein- und Ausschalten des Reinigungsroboters
- Zustandsanzeige
- Ändern von Einstellungen in der Programmautomatik
- Steuerung des Reinigungsroboters im Notbetrieb, siehe Bedienung im Notbetrieb
Tastenübersicht Bedienkonsole
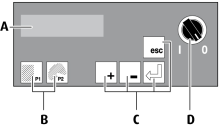
A) Anzeige
B) Programmwahltasten (Direktwahltasten)
C) Menüsteuerungstasten
D) Hauptschalter (0= AUS, I= EIN)
Menüsteuerungstasten
| Symbol | Bedeutung |
 |
Direktwahltaste P1 Wählt das unter P1 gespeicherte Programm, welches über den Menüpunkt Becken 1 definiert ist. proliner plus/ proliner navi3: Wird die Taste für 5 Sekunden gedrückt, wird das unter P3 gespeicherte Programm gewählt. |
 |
Direktwahltaste P2 Wählt das unter P2 gespeicherte Programm, welches über den Menüpunkt Becken 3 definiert ist. proliner plus/ proliner navi3: Wird die Taste für 5 Sekunden gedrückt, wird das unter P4 gespeicherte Programm gewählt. |
 |
PlusTaste Navigation abwärts zwischen den Menüpunkten einer Menüebene oder Werte ändern. |
 |
MinusTaste Navigation aufwärts zwischen den Menüpunkten einer Menüebene oder Werte ändern. |
 |
EscapeTaste Verlassen der aktuellen Menüebene ohne Speichern. |
 |
EnterTaste Wechselt in die nächste Menüebene oder speichert die Einstellung. |
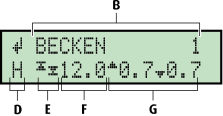
Anzeige
Betriebsbereit
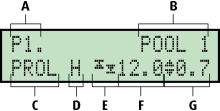
Im Reinigungsbetrieb (Automatik)
A) Reinigungsprogramm
B) Beckenname
C) Gerätemodell
D) Eingestelltes Fahrmuster (H, N oder X)
E) Funktion "Ausrichten" aktiviert
F) Eingestellte Reinigungsgeschwindigkeit
G) Abdrehposition ab Beckenwand
Fernbedienungen
Warnung
Während des Betriebs des Reinigungsroboters dürfen sich keine Personen im Wasser aufhalten.
Bei Betrieb des Reinigungsroboters mit der Fernbedienung muss Sichtkontakt gegeben sein, Betrieb ist bis zu einer Entfernung von 50 m möglich.
Fernbedienung mit LED-Anzeige
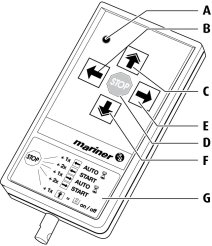
A) LED-Anzeige
B) Richtungstaste links
C) Richtungstaste vorwärts, mehrstufig
D) Stopp
E) Richtungstaste rechts
F) Richtungstaste rückwärts, mehrstufig
G) Folie für Tastenkombination
Funkkanal einstellen für Fernbedienung mit LED
LED Batteriestatus
Bei jedem Tastendruck auf der Fernbedienung zeigt das Blinken der LED-Anzeige an, dass die Batterie noch in Ordnung ist. Blinkt die LED-Anzeige nicht mehr, so muss die Batterie (9 V) ersetzt werden. Dazu muss der Deckel auf der Rückseite der Fernbedienung entfernt werden.
Der proliner kann ohne funktionstüchtige Fernbedienung nur über die Bedienkonsole betrieben werden, siehe Bedienung im Notbetrieb.
Fernbedienung mit LCD-Anzeige
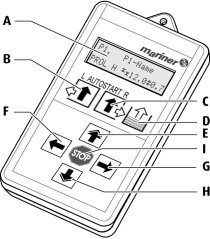
A) LCD-Anzeige
B) Automatikstart mit Versatz nach links
C) Automatikstart mit Versatz nach rechts
D) Auftauchen/Pumpe AUS
E) Richtungstaste vorwärts, mehrstufig
F) Richtungstaste links
G) Richtungstaste rechts
H) Richtungstaste rückwärts, mehrstufig
I) Stopp
Funkkanal einstellen für Fernbedienung mit LCD
Fahrprogramme
X-Fahrprogramm
Das X-Fahrprogramm steuert den Reinigungsroboter in einem kreuzförmigen Fahrmuster und ist daher für unregelmässige Beckenformen (auch mit Vertiefungen) geeignet. Grundsätzlich sind keine spezifischen Einstellungen für dieses Fahrprogramm vorzunehmen.
H- und N-Fahrprogramme
Diese Fahrprogramme funktionieren nach dem Bahn-für-Bahn-Prinzip. Sie steuern den Reinigungsroboter auf einer geraden Bahn vor und zurück. Die Versatzbreite zwischen den Bahnen ist einstellbar. Beide benötigen bahnspezifische Einstellungen. Beckenvertiefungen sollten vermieden werden.
Nach Möglichkeit parallel zur kürzeren Beckenseite reinigen. Grund: Je kürzer die Reinigungsstrecken, desto genauer der Geradelauf.
Richtungswechsel
Der Reinigungsroboter führt im Automatikbetrieb selbständig Richtungswechsel aus. Dies geschieht immer dann, wenn eine der folgenden Umschaltbedingungen erfüllt wird:
| X | N, H | Umschaltbedingung | Skizze |
 |
|
Bei Wandkontakt Proliner und proliner plus: Abhängig von der Schlagstärke oder Motorstromaufnahme.Proliner navi3: Über mechanische Schaltung. |
 |
|
|
Über Fahrstrecke Abhängig vom zurückgelegten Weg (max. Fahrstrecke). |
 |
|
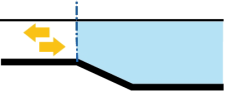
Vor Neigung nach unten Vor Sprunggruben oder anderen Vertiefungen schaltet das Gerät automatisch um (proliner plus optional, proliner navi3 serienmässig). |
 |
|
|
|
In Schrägen Abhängig vom eingestellten Winkel, der nicht überschritten werden darf. |
 |
|
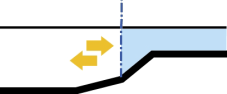
Bei Beckenauslauf und Hindernissen Abhängig von Veränderung der Wassertiefe. |  |
|
|
Bei Hindernissen Trifft der Reinigungsroboter in Rückwärtsfahrt auf ein Hindernis, wird dieses in einem dafür festgelegten Manöver umfahren. Als Hindernis werden fest im Schwimmbecken eingebaute Gegenstände verstanden, welche zu einer Reduktion der Beckenlänge von mindestens 2 Metern führen. |
 |
Das Bedienpersonal verwendet für ein bestimmtes Becken in der Regel immer dasselbe Fahrprogramm. Zu diesem Zweck verfügt jeder Reinigungsroboter über zwei Direktwahltasten (P1 und P2). Diese können mit Fahrprogrammen der internen Speicherplätze belegt werden und sind danach schnell und direkt abrufbar.
Hinweise zur Einstellung von Fahrprogrammen siehe Einstellungen. Das Umschaltverhalten kann in der Menüsteuerung festgelegt werden, siehe Menüstruktur und Navigation.
Begriffsdefinition zur Bedienung
Geradelauf
Richtungsabweichungen des Gerätes in der Fahrspur in den Fahrprogrammen H und N können verschiedene Ursachen haben:
- Qualität des Beckenbodens
- Ebenheit oder Neigung des Beckenbodens
- Verunreinigungen und Verschleiss an den Walzen
- Verstopfte Filter
- Verschleiss oder Verunreinigung der Antriebselemente
Fehlerquellen und Abhilfen siehe Problembehebung. Bei Betrieb im Fahrprogramm X muss der Geradeauslauf nicht berücksichtigt werden.
Startverzögerung
Ist die Startverzögerung im Fahrprogramm aktiviert, so wartet der Reinigungsroboter für eine individuell definierte Zeit, bevor er mit dem Reinigungsprozess beginnt.
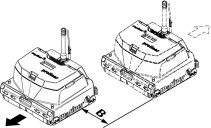
Versatzbreite
In den Fahrprogrammen H und N versetzt der Reinigungsroboter seine Fahrspuren jeweils um eine individuell einstellbare Versatzbreite (B).
Steigerung der Reinigungseffizienz
Bewegtes Wasser vermindert die Reinigungseffizienz des Gerätes. Der Wirkungsgrad wird erheblich erhöht, wenn Schmutzpartikel vor dem Reinigungsvorgang in unbewegtem Wasser auf den Boden absinken können. Zu diesem Zweck verfügt die Steuerung des Reinigungsroboters über die Funktion „Startverzögerung“.
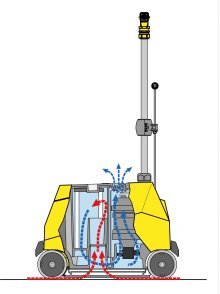
Filterung/ Durchflussschema
Die integrierte Pumpe saugt schmutziges Wasser an der Unterseite des Reinigungsroboters an. Dadurch entsteht ein Unterdruck, welcher das Gerät an den Beckenboden saugt. Das geförderte Wasser wird durch die Filterpatronen gezogen, wo Verunreinigungen an den Filterwänden hängen bleiben oder auf den Boden der Filterbox fallen. Das gereinigte Wasser wird an der Deckeloberseite wieder ausgestossen.
Entlüftung
Während der Beckenreinigung erfolgt eine Entgasung des Wassers im Gerät. Im Wasser enthaltene Gase sammeln sich in der Filterbox, was zu einer Veränderung des Auftriebs des Gerätes führt. Der Auftrieb kann dadurch so weit ansteigen, dass das Gerät zu schweben beginnt. Um dies zu verhindern, kann die Funktion „Entlüften“ aktiviert werden. Bei aktivierter Entlüftung stoppt das Gerät jeweils nach Ablauf von 2 Minuten und dem darauf folgenden Wandkontakt. Der Antrieb und die Pumpe werden für 6 Sekunden ausgeschaltet. Dadurch können die angesammelten Gase über dafür vorgesehene Öffnungen aus der Filterbox entweichen. Der Entlüftungsvorgang wird während des gesamten Reinigungsvorgangs im Automatikbetrieb nach diesem Muster wiederholt, siehe Ablauf des Programmes.
Mariner 3S empfiehlt, die Entlüftung immer eingeschaltet zu lassen.
Reinigungszeit h
Die Reinigungszeit kann individuell definiert werden und bestimmt, wie lange der Reinigungsroboter im Automatikmodus reinigt. Die programmierte Reinigungsdauer endet
- nach Ablauf der gewählten/eingestellten Reinigungszeit.
- wenn das Programm manuell abgebrochen wird.
- im Fahrprogramm H, nachdem kein weiteres seitliches Versetzen mehr möglich ist.
Mariner 3S empfiehlt, die Reinigungszeit auf ein Minimum zu beschränken.
Grund:
- geringer Energieverbrauch
- geringer Verschleiss
Wandreinigung
Die Wandreinigung ist nur manuell möglich. Die Manövrierbarkeit ist dabei abhängig von der Wandbeschaffenheit (Oberfläche) und dem Unterdruck (Filterzustand und Verschmutzungsgrad).
Technische Daten
Allgemeine Angaben
| Dimensionen Roboter proliner/proliner plus | 55x60x37 cm (LxBxH) |
| Dimensionen Roboter proliner navi3 | 83x61x52 cm (LxBxH) |
| Betriebsspannung | 24 VDC |
| Stromstärke | 16 A |
| Eingangsleistung | 0.45 kW |
| Schutzart Roboter | IP68 |
| Schutzart Fernbedienung LED | IP54 |
| Schutzart Fernbedienung LCD | IP67 |
| Schutzklasse | III |
| min. Wassertiefe | 20-30 cm |
| max. Eintauchtiefe | 10 m (>7 10 m Eintauchzeit bis max. 1h) max. Wassertemperatur 40 °C |
| min. Wassertemperatur | 10 °C |
| Gerätebreite | 600 mm |
| Reinigungsbreite | bis max. 700 mm |
| Förderleistung Pumpe | 850 l/min |
| Feinheit Lamellenfilter | 50/100/130 Mikron |
| Netzkabellänge | 10/20 m |
| Schwimmkabellänge | 30/40/50 m |
| Fahrgeschwindigkeiten | 1.Stufe: 7.5 m/min |
| 2.Stufe: 12.0 m/min | |
| 3.Stufe: 18.0 m/min | |
| Anschlusssteckdose | Schutzleiter zwingend |
| Versorgungsspannung | 100 240 V |
| Frequenz | 50/60 Hz |
| Stromaufnahme | 6 4 A |
| Nennleistung | 0.5 kW |
Der Netzanschluss muss mit den Angaben auf dem Typenschild am Gerät übereinstimmen, siehe Typenschild.
Steuerung
| Normalbetrieb | Drahtlos, Funkfernbedienung |
| Funkfrequenz | 868 MHz (optional 433 MHz) |
| Programmierung, Notbetrieb | Bedienkonsole am Transportwagen |
| Automatik proliner | X-Programm |
| Automatik proliner plus/navi3 | X, H und N-Programm |
Weitere Hinweise zu den Fahrprogrammen siehe Fahrprogramme.
Gewicht proliner/proliner plus
| Transportwagen mit 40 m Kabel | 49 kg |
| Reinigungsroboter mit minimaler Filterkapazität | 28 kg |
| Gesamtnettogewicht | 77 kg |
Gewicht proliner navi3
| Transportwagen mit 40 m Kabel | 62 kg |
| Reinigungsroboter mit maximaler Filterkapazität | 43 kg |
| Gesamtnettogewicht | 105 kg |